Fiche Architecture
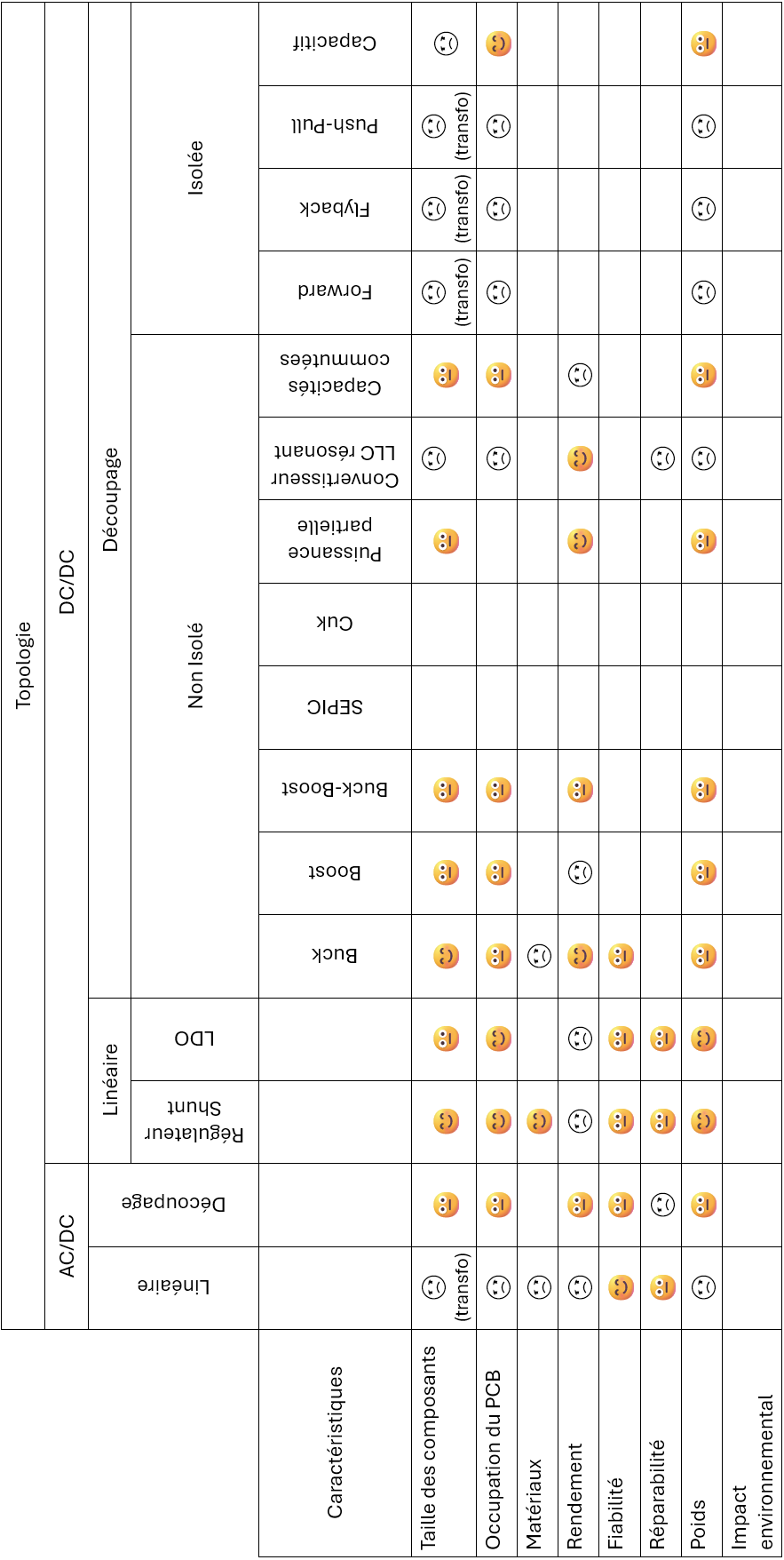
1. Topologies
1.1. Linéaire
1.1.1. Alimentation secteur (AC/DC)
Ces alimentations mettent en oeuvre des transformateurs et un circuit de redressement et filtrage. Ce sont généralement des solutions abaisseuse. En dépit du cout et du poids des transformateurs, ces alimentations sont encore privilégiées dans les domaines de l'alimentation de précision (certains équipements médicaux par exemple) ou pour la conception d'équipements audio de grande performance.
Le schéma bloc d'une alimentation secteur linéaire est donnée dans le schéma ci-dessous:

Le transformateur abaisseur génère une tension alternative dont la valeur crête est supérieure à (Vout x Ö2) avec Vout la valeur RMS de la tension de sortie souhaitée. Il existe différents types de transformateurs avec des circuits magnétiques dans des matériaux et des formes différentes plus ou moins optimisés pour des applications spécifiques.
Le bloc redresseur permet d'obtenir une tension positive en sortie. On distingue différents types de redresseurs :
- Redressement mono-alternance (half bridge)
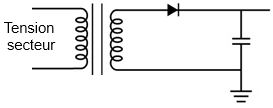 |
C'est la topologie de base. Seule l'alternance positive est redressée et contribue à la génération de la tension de sortie. |
- Redressement point milieu (Center-tapped)
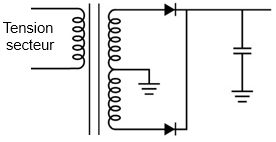 |
Cette topologie intermédiaire utilise 2 enroulement pour redresser l'alternance positive et l'alternance négative. Une seule diode est nécessaire pour chaque circuit, mais il faut 2 enroulement secondaires identiques. (poids et encombrement) Elle est réservée aux applications nécessitant des tensions symétriques en sortie (+/-15V) |
- Redressement double alternance (full bridge)
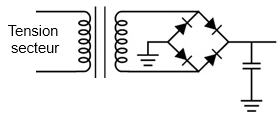 |
La solution la plus efficace. Les alternances positives et négatives sont redressées à travers le pont. On transfert donc 2 fois plus d'énergie. On a une chute de 2xVD (2 tension de diode), mais au bénéfice d'un seul enroulement secondaire. |
Le filtrage permet de lisser la tension redressée. La version la plus basique est un condensateur électrochimique de très forte valeur, mais il subsiste une ondulation importante en sortie.
Par assurer une tension stable et constante en sortie, le bloc régulateur est ajouté en sortie. Il s'agit d'une régulateur linéaire simple comme un .
1.1.2. Alimentation DC/DC
L'alimentation linéaire en continue ne permet de réaliser qu'un régulateur abaisseur.
On distingue 2 grandes familles d'alimentation linéaires : les régulateurs Shunt et les régulateurs Série.
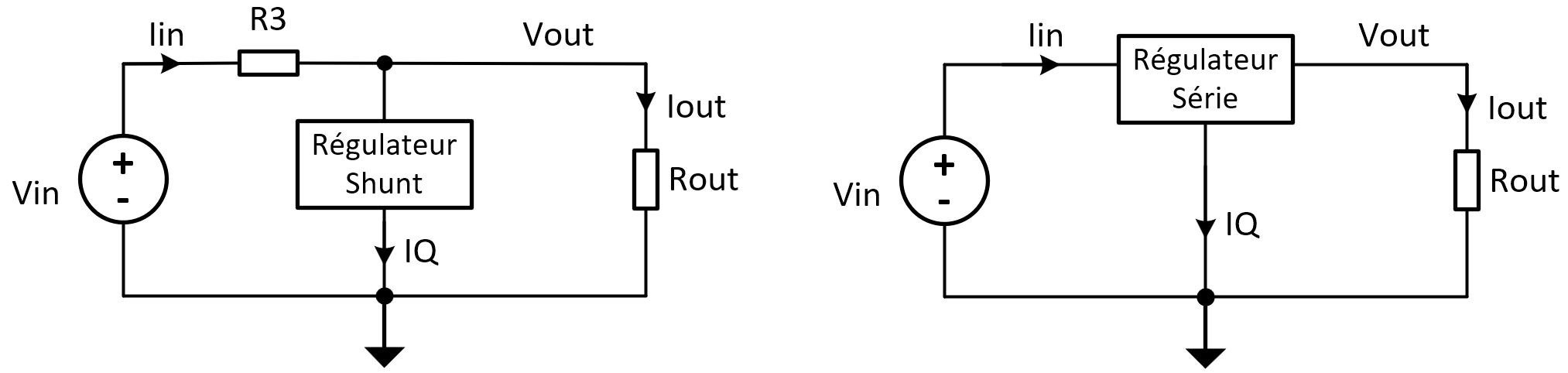
1.1.2.1. Régulateur Shunt
Le régulateur Shunt est la topologie la plus simple. Le composant de régulation est positionné en parallèle avec la charge. Il est adapté principalement à la génération de relativement faibles courant (20mA à 100mA) en raison de pertes importantes.
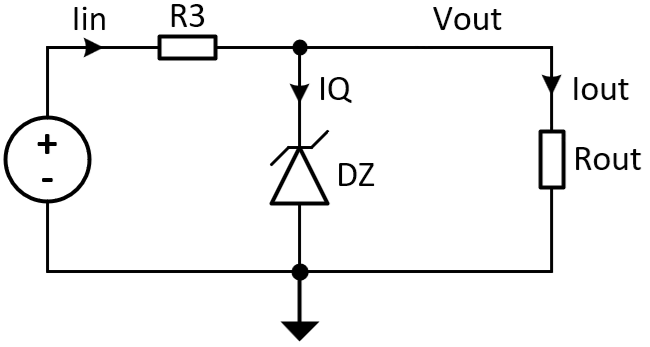
La version de base est la diode Zener comme présenté sur la figure ci-dessous. L'avantage est la simplicité de la mise en oeuvre,. Ce circuit est bien adaptée pour les tension élevées et courant faibles.
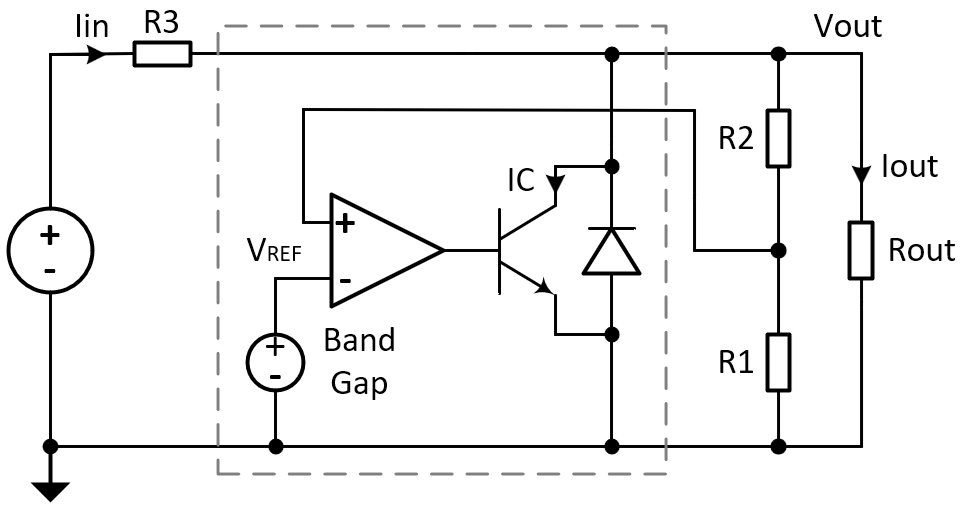
Une variante est le régulateur Shunt intégré avec une référence stabilisée de type Bandgap. La tension de sortie est ainsi plus précise et plus stable en température.
1.1.2.2. Régulateur Série
Le principe du régulateur linéaire est présenté sur la figure suivante:
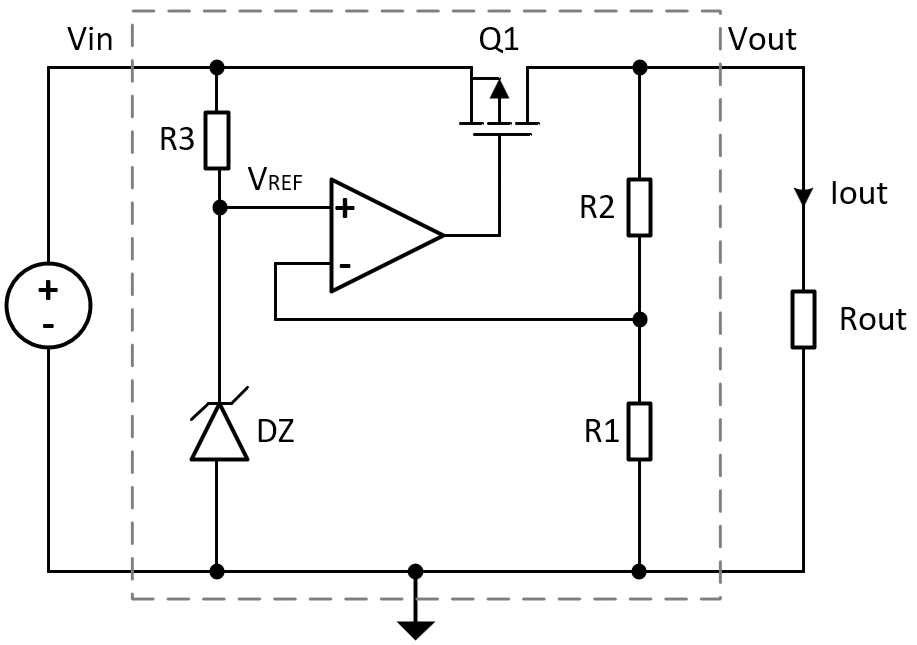
Un portion de la tension de sortie prélevée avec le pont diviseur R1R2 est appliquée en entrée du comparateur A dont l'entrée négative est connectée à une référence de tension. Le comparateur contrôle le transistor pour asservir la tension de sortie à la valeur souhaitée.
Les LDO sont une technologie avancée de régulateur linéaire qui présentent une très faible chute de tension entre entrée et sortie (Dropout) qui permet de minimiser les pertes.
En effet, la chute de tension entre entrée et sortie est dissipée dans le transistor sous forme d'effet joule.
Exemple:
| Tension d'entrée : Vin = 12V, | ||
| Tension de sortie : Vout = 5V | Courant de sortie : Iout = 0.5A | |
| Régulateur LM7805 | Tj_max = 150°C | Courant consommé par le régulateur IQ = 6mA |
Puissance en entrée : Pin = Vin x (Iout + IQ) = 6.07W
Puissance en sortie : Pout = Vout x Iout = 2.5W
Rendement = Pout / Pin = 2.5 / 6.072 = 41.2%
Pertes par effet Joule dans le transistor : P = (Vin - Vout) Iout + Vin x IQ = 3.57W
La température de jonction est donnée par la relation : Tj = Ta + [(Vin - Vout) x Iout] x RTHja
Avec la température ambiante Ta = 25°C, RTHja la résistance thermique du boitier monté sur un PCB
Ce régulateur existe en différents boitiers avec différentes caractéristiques de conduction thermique
| Boitier | SOT-223 | DDPAK/TO-263 | TO-3 | TO-220 |
| Dimensions | 6.50 mm × 3.50 mm | 10.18 mm × 8.41 mm | 38.94 mm x 25.40 mm | 14.986 mm × 10.16 mm |
| Image |  |
 |
 |
 |
| RTHja | 62.1°C/W | 44.8°C/W | 39°C/W | 23.9°C/W |
| Tj | 242.4°C | 181.8°C | 161.5°C | 108.7°C |
Dans cette configuration, seul le boitier TO-220 pourrait être utilisé seul sans l'ajout d'un dissipateur.
Avantages et inconvénients principaux du régulateur linéaire:
- Simples à mettre en oeuvre, peu de composants externes
- Génère une tension stable, sans bruit, adaptée aux circuits sensibles
- Réagit rapidement aux changement de charge
1.2. Découpage
1.2.1. Buck
-
- Convertisseur à découpage, abaisseur de tension
- Limite les pertes associées au LDO (thermique)
- Présente un bon rendement de conversion
- bonne régulation de la tension de sortie
- Malgré la régulation performante et le filtrage de sortie, des composantes de la fréquence de découpage sont présentes en sortie et peuvent perturber le fonctionnement du système.
- Différents mode de pilotage et de fonctionnement :
-
- Mode continu (Forced Continuous Mode). Dans ce mode le convertisseur est toujours actif ce qui conduit à une rendement optimal dans la gamme haute de courant de sortie, mais à un rendement faible pour la gamme des faibles courants. Dans cette configuration la tension de sortie est bien régulée à la valeur souhaitée quelque soit le courant de sortie.
- Mode PFM ou Eco-mode ou Pulse Skipping Mode ou Power Save Mode. Ces modes proposés de plus en plus couramment permettent d'améliorer fortement le rendement sur toute la gamme de courants de sortie, mais la régulation est moins performante sur les faibles courants avec une discontinuité de la régulation et une ondulation plus forte.
-
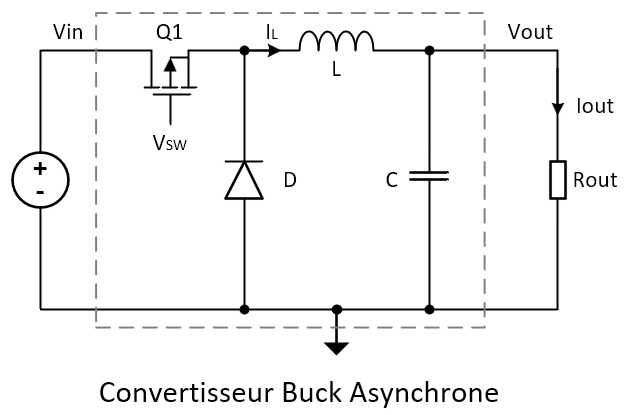
- Le schéma de principe d'un convertisseur Buck asynchrone est présenté sur la figure suivante:
|
|
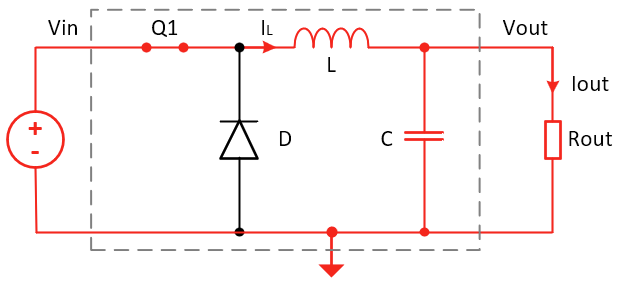
Pendant le première phase, l'interrupteur (transistor) est fermé, la diode est bloquée, le courant circule dans la branche principale, l'énergie est emmagasinée dans l'inductance. |
|
|
Pendant la seconde phase, l'interrupteur est ouvert, la diode devient passante et le courant emmagasiné dans l'inductance est transféré dans la charge (pas de discontinuité de courant dans l'inductance). Le condensateur permet de filtrer le signal de sortie et de limiter ainsi l'ondulation résiduelle. |
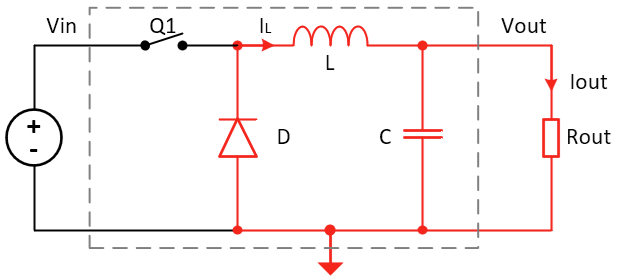
La tension de sortie est ajustée en variant le rapport cyclique de conduction de l'interrupteur.
Dans cette topologie, les pertes sont dues principalement aux éléments parasites des composants (les résistances série de l'inductance et du transistor et de la diode.
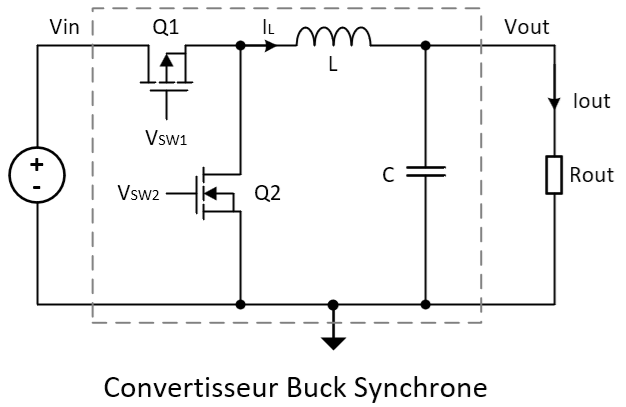
Aux plus fortes puissances, la diode présente des pertes importantes. Elle peut être remplacée par un MOSFET piloté avec un signal complémentaire du switch principal. Le MOSFET a une résistance série très faible et ne présente pas de tension directe comme la diode. On parle alors de convertisseur Buck synchrone. A l'inverse il est un peu moins performant sur les faibles courants.
La performance du circuit va être un compromis entre la fréquence de commutation et les pertes dans les composants:
- plus la fréquence est basse, plus la valeur de l'inductance est grande, donc plus le boitier sera gros ou les éléments parasites élevés, mais plus les pertes en commutation dans les transistors seront faibles
- plus la fréquence est élevée, plus la valeur de l'inductance est faible, plus le boitier pourra être petit, tout en assurant une résistance série faible, mais les pertes en commutations seront plus élevées dans les transistors.
- Pour réduire les pertes en commutation la mise en oeuvre de contrôleurs avec transistors discrets permet un gain important pour les applications de puissance, mais au détriment d'une surface plus grande de PCB.
Exemple:
Mise en oeuvre d'un Buck pour générer 5V-0.5A depuis une source 12V
| Référence | Fréquence de commutation (Fsw) | Rendement | Nombre de composants | Valeur d'inductance (L) | Surface inductance | Surface du circuit |
| LM25007 | 149kHz | 85.4% | 20 | 180uH | 204.5mm² | 300mm² |
| LMR51450 | 187kHz | 97.1% | 12 | 15uH | 652mm² | 716mm² |
| LM22675-5.0 | 500kHz | 92.7% | 7 | 33uH | 626.67mm² | 735mm² |
| TPS562203 | 500kHz | 96.5% | 12 | 4.7uH | 74mm² | 130mm² |
| LMR43620MB5-FIXED | 1MHz | 96.5% | 9 | 4.7uH | 146.4mm² | 195mm² |
| TPS562242 | 1.3MHz | 95.9% | 13 | 3.3uH | 50.4mm² | 106mm² |
| TPS62163 | 2.4MHz | 91.5% | 5 | 2.2uH | 64mm² | 94mm² |
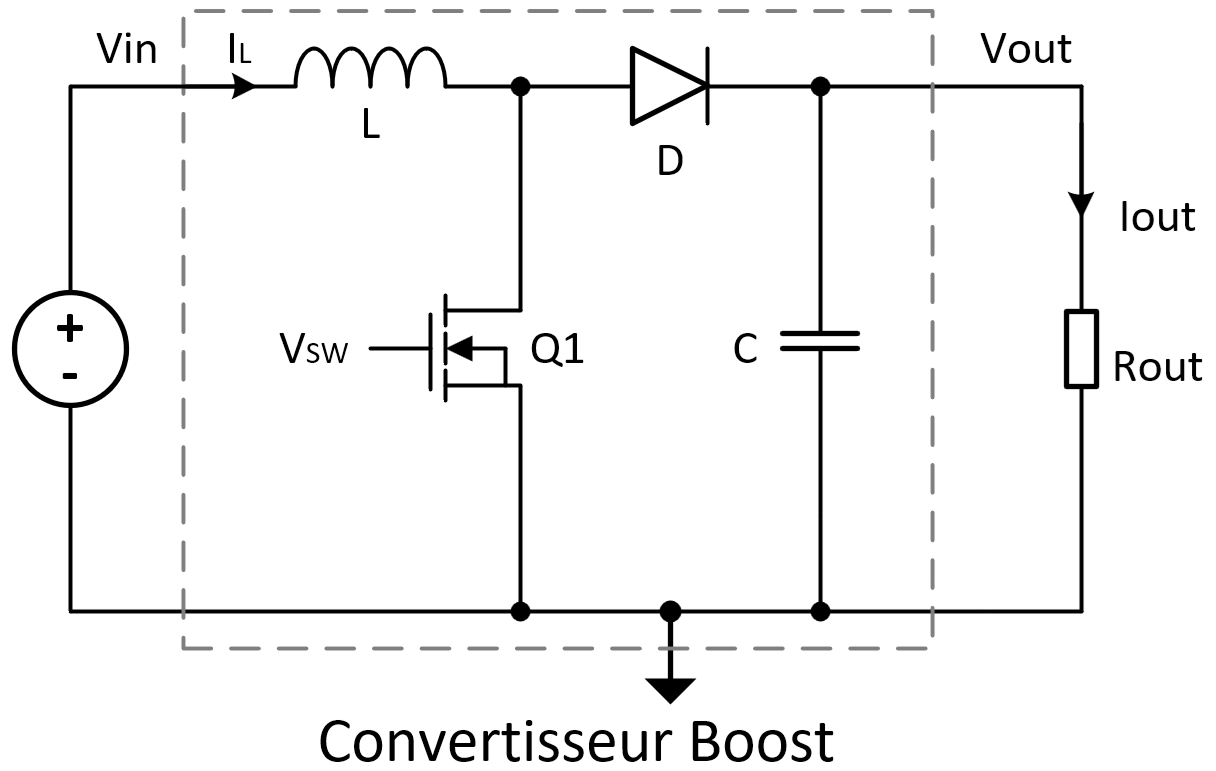
1.2.2. Boost
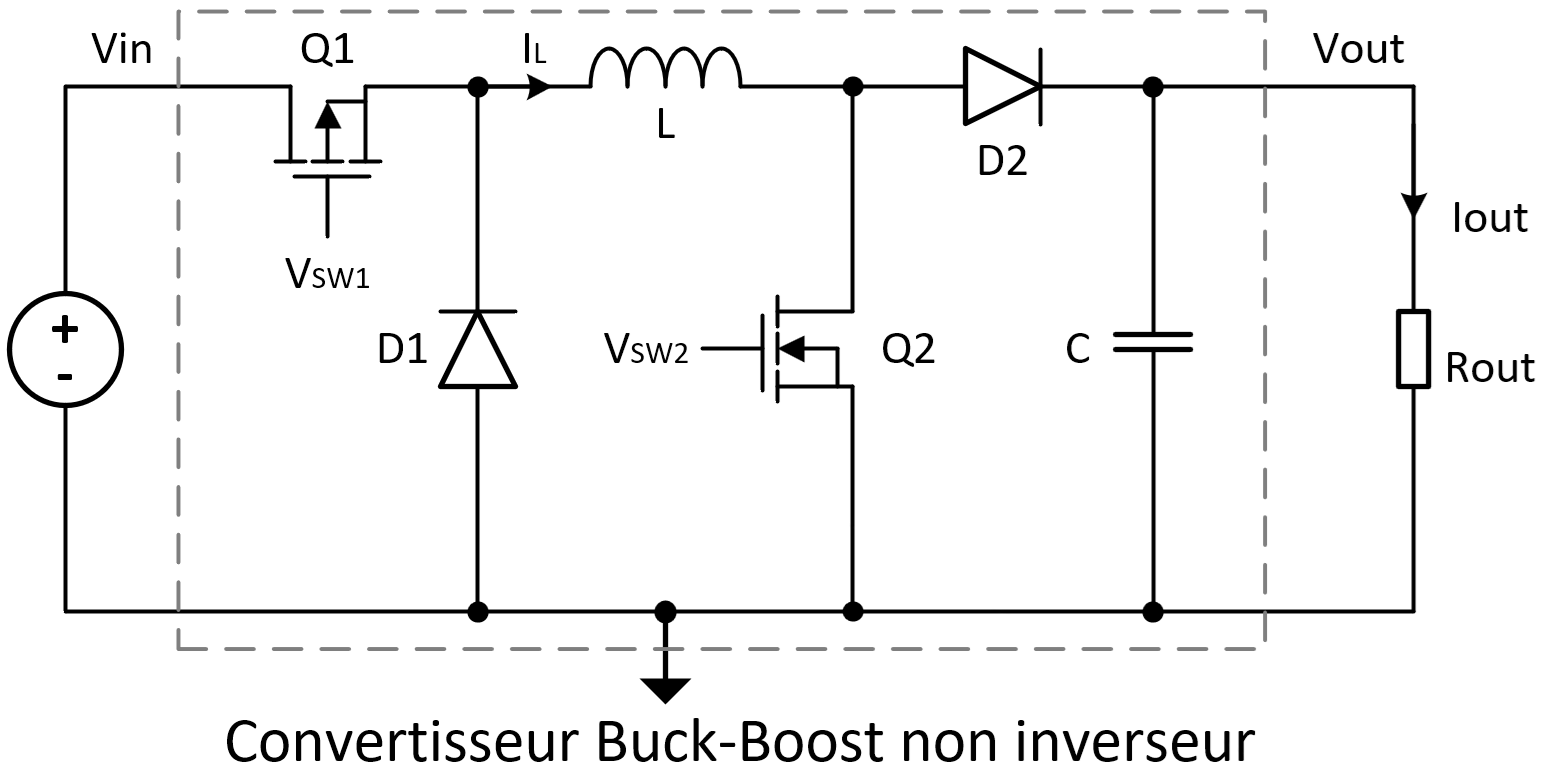
1.2.3. Buck-Boost
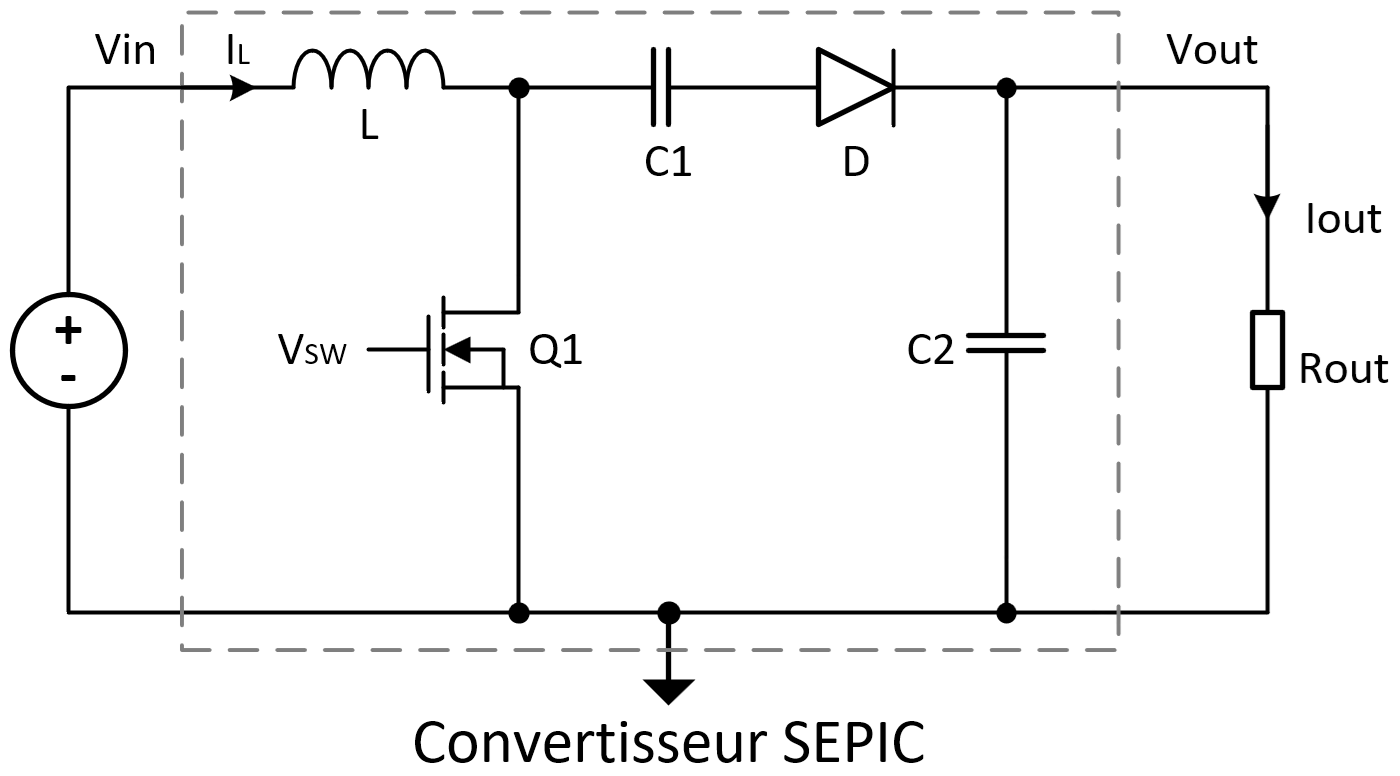
1.2.4. SEPIC
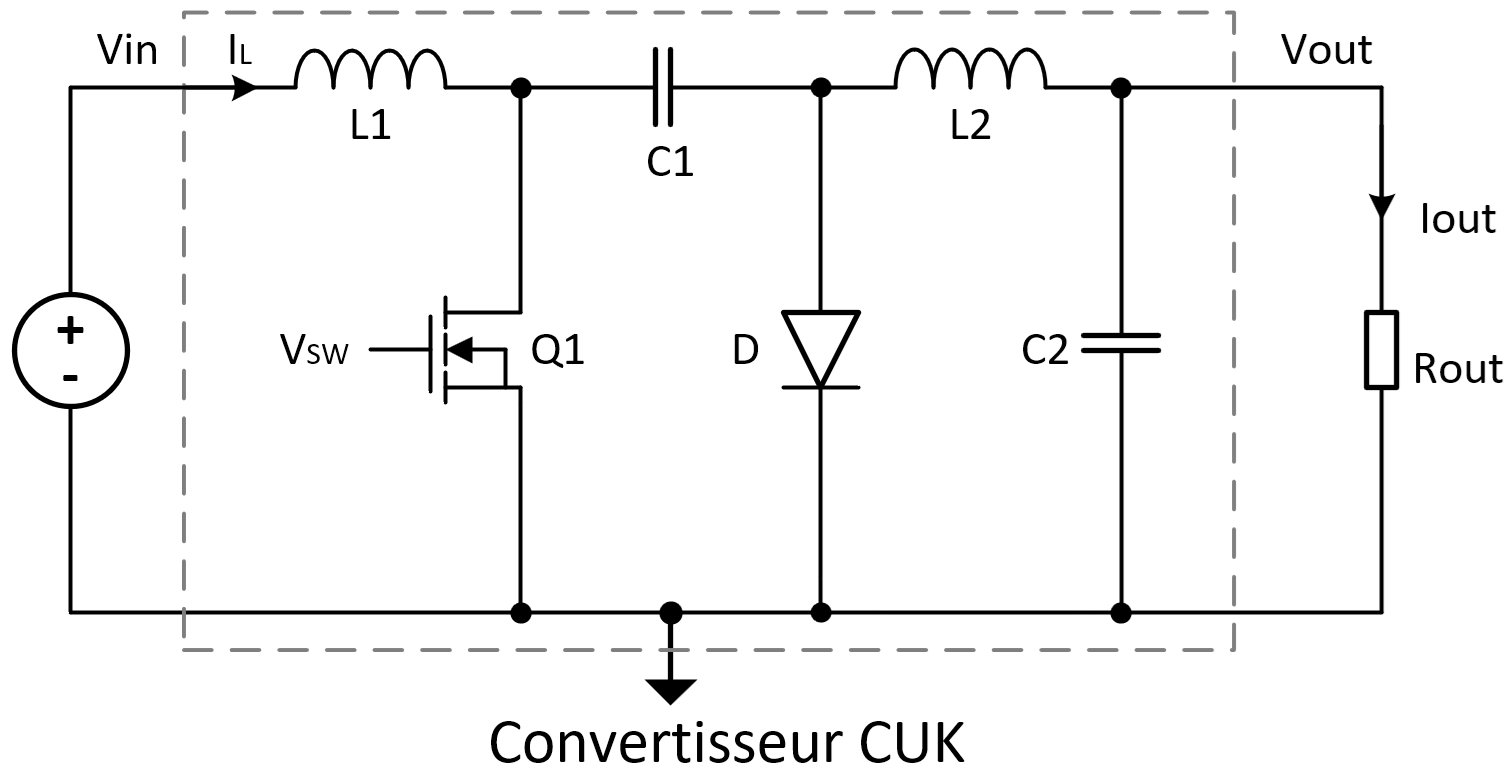
1.2.5. Cuk
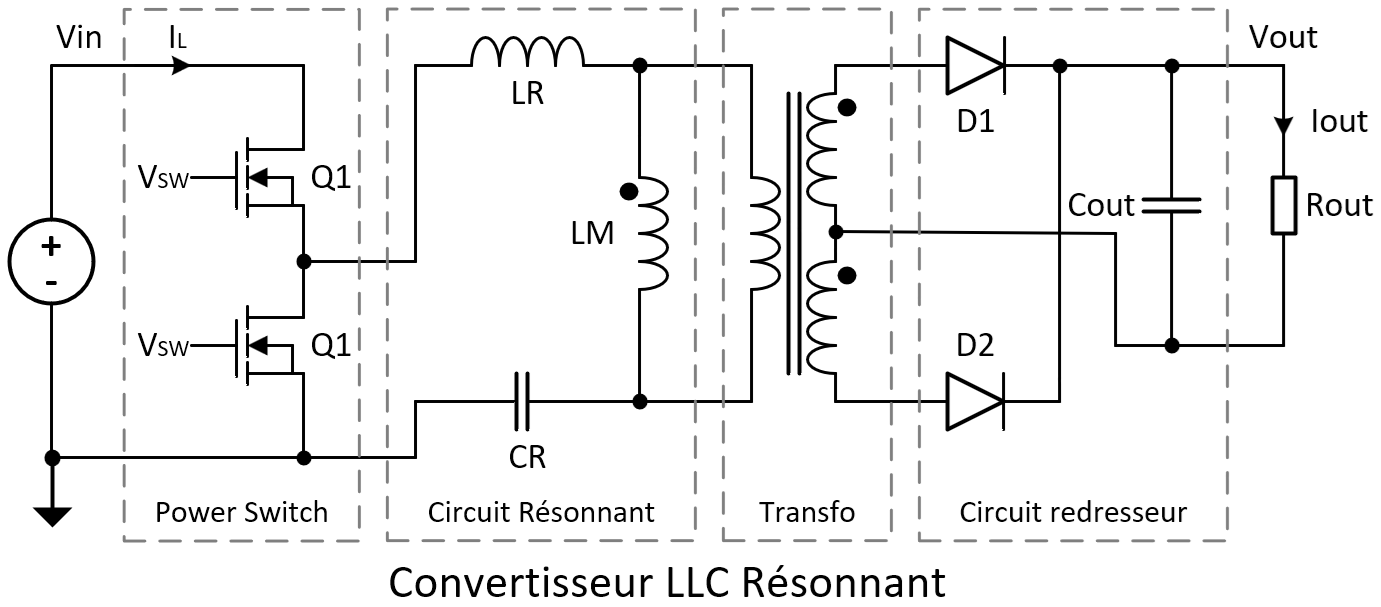
1.2.6. Convertisseur LLC résonnant
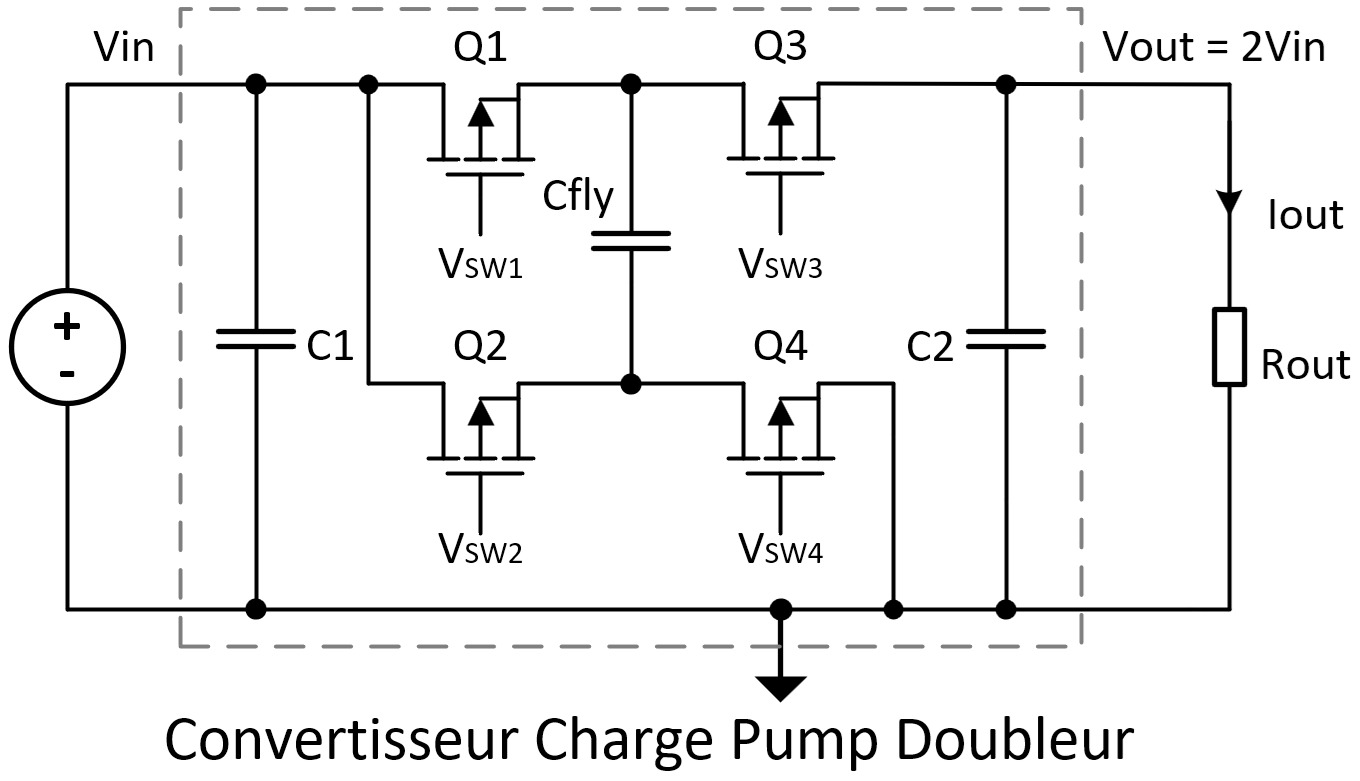
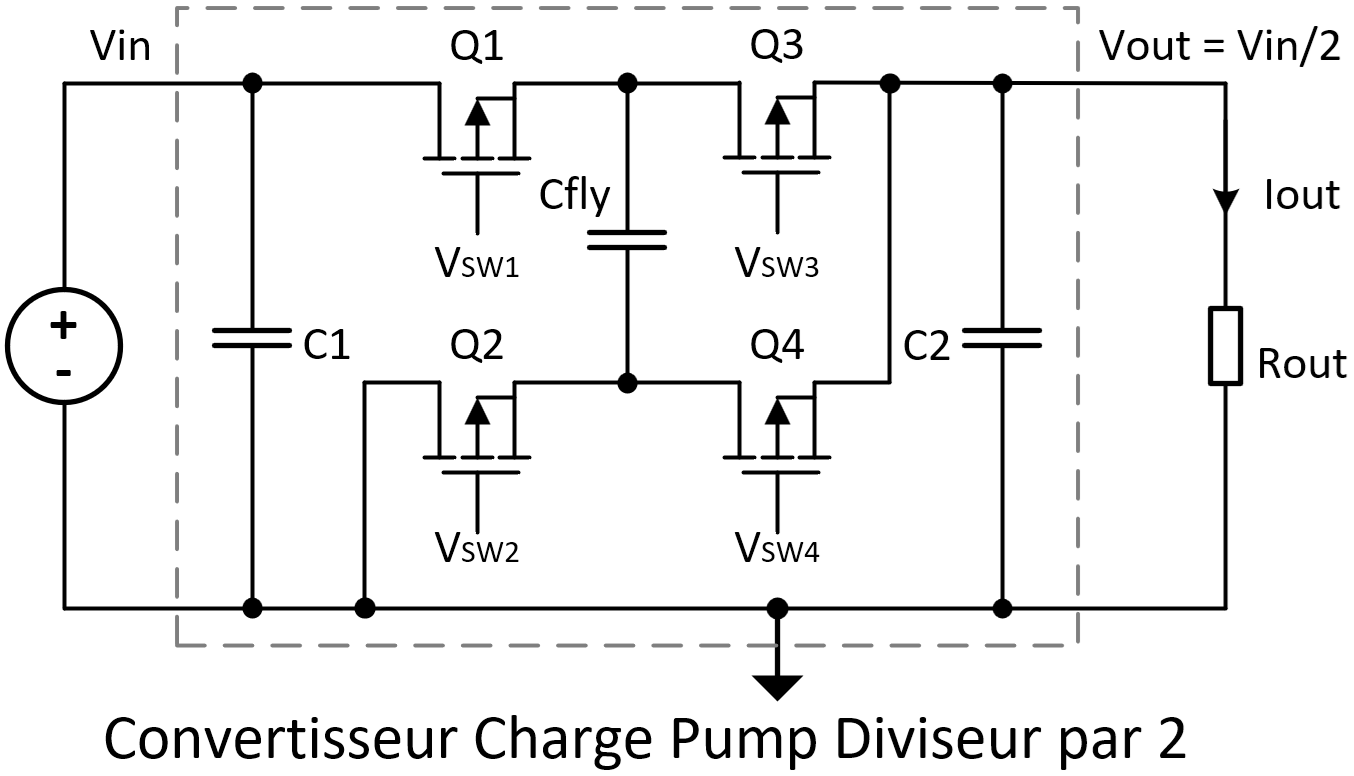
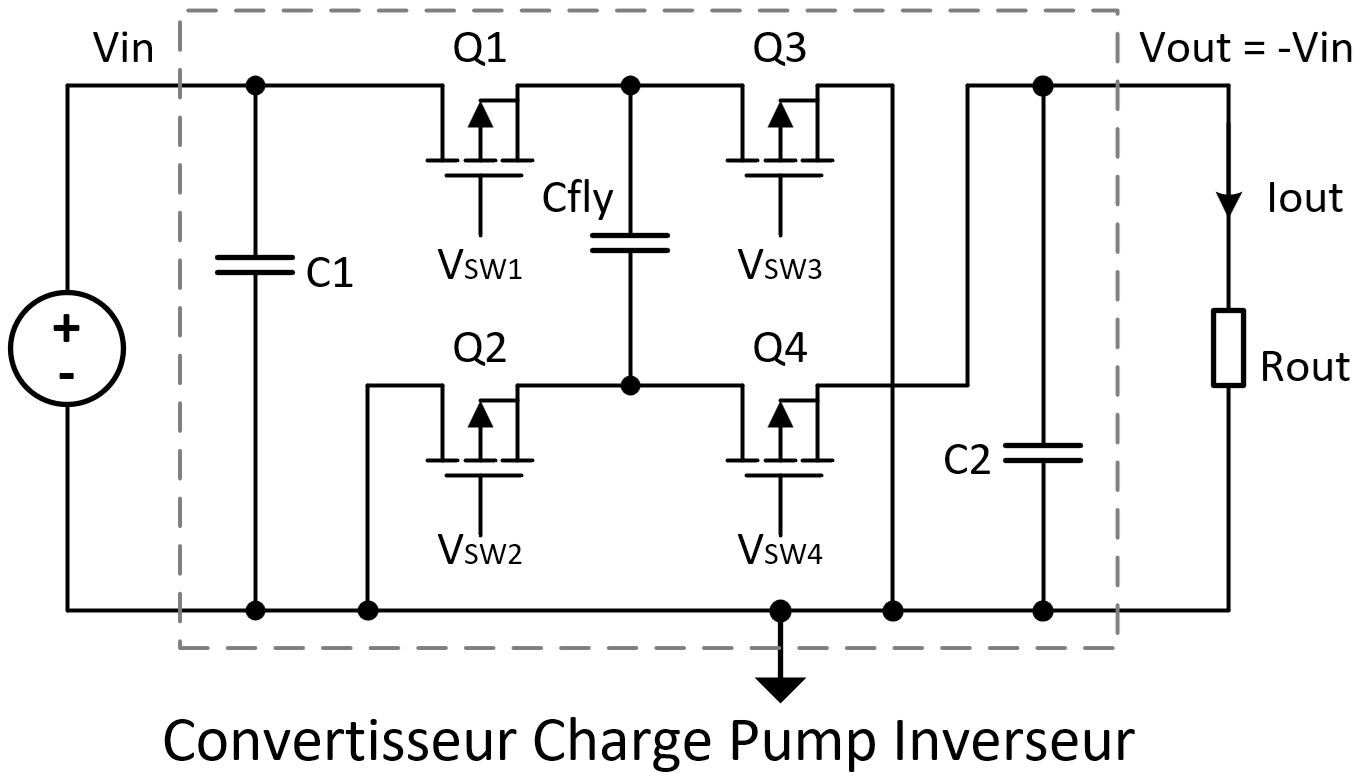
1.2.7. Capacités commutées (Pompe de charges)
1.2.8. Puissance partielle
1.2.9. Convertisseur Isolé
1.3. PMIC
Combinaison de différentes architectures dans un boitier unique pour une optimisation en vue de l'intégration du système. C'est aussi une solution optimisée pour la mise en oeuvre de processeurs et de FPGA: le fabricant du contrôleur/circuit logique s'associe avec un fabricant d'alimentation ou dispose du savoir faire en interne pour proposer un composant d'alimentation dédié à ses poduits (NXP, Analog Devices, TI...)
-
-
-
- Application specific (Processor, Instrumentation)
- Multiples Buck et Boost/Buck-Boost
- Buck ou Boost + LDO
- Buck, Boosts, Battery Chargers
-
-
2. Synthèse
Exemples d'évaluation d'impacts environnementaux
2 mini ACV à titre d'exemple sur 2 topologies de bloc d'alim
Recommandations des industriels
à traiter, ventiler ...
|
Industriel |
Verbatim |
Etape Roue de Brezet |
|
ATLANTIC |
Piles? Batterie? Condensateur, SuperCap, Energy harvesting... |
0 ; 1 |
|
EMKA |
réduire le poids des alimentations permet de réduire les emballages car réduit de beaucoup les poids des produits (SWaP : Size Weight and Power) |
2 |
|
4MOD |
Une alimentation adaptée au dispositif. S'assurer que le moyen d'alimentation choisi soit le plus optimal par rapport aux fonctions espérées du produit. |
0 ; 2 |
|
4MOD |
Alimentation "standard" (Ex: USB-C permettant de minimiser l'impact d'un câble supplémentaire et d'un adaptateur secteur --> mettre ACV à l'appui) |
0 |
|
ATLANTIC |
Alim à découpage ou linéaire ?
|
1 |
|
ATLANTIC |
Dimensionnement (au plus juste) Comment optimiser l'arbre d'alimentation ? |
1 ; 2 |
|
BODET |
Choisir la bonne typologie de convertisseur pour maximiser les rendements (DC/DC vs LDO qui sont souvent moins efficaces) Même pour des applications ultra-low power, le choix du DC/DC peut-être pertinent et permet souvent d'allonger l'autonomie de l'équipement car le mode Boost est possible. Attention, dans ce cas précis, il faut choisir avec soin le convertisseur qui doit être prévu pour minimiser sa consommation propre (rechercher des convertisseurs plutôt orientés "Energy Harvesting"). |
1 ; 5 |
|
BODET |
Bien identifier les modes d'énergie de l'équipement (ALLUME, ETEINT, VEILLE RAPIDE, VEILLE PROFONDE, TRANSPORT, etc…) et les budgets de consommation associés. L'idée étant de pouvoir choisir les régulateurs en conséquence |
5 |
|
BODET |
Faire un arbre d'alimentation avec les rendements renseignés pour chaque régulateur (exemple d'outil Ptree, voir image ci-contre). Cf Annexes |
1 ; 2 |
|
Critères principaux de choix d'une alim externe sur étagère |
||
|
LACROIX |
ü Bon dimensionnement de la puissance ü Rendement essentiel ü Conso à vide / en veille |
5
|
|
LACROIX |
ü Capacités environnementales compatibles avec l'utilisation (pour éviter pannes juvéniles et améliorer durabilité) ü MTBF : durabilité à titre comparative |
6 |
|
LACROIX |
Masse totale + dimensions/matière boitier méca, emballage, déchets, etc. |
2 |
|
Critères principaux d'éco-conception d'une alim interne (mêmes critères que sur alim externe mais sous-ensembles où on a la main sur la conception) |
||
|
LACROIX GUILLEMOT |
ü Bon dimensionnement de la puissance § Alimentation se défini autour d'un noyau magnétique --> choix juste de la bonne carcasse magnétique qui va définir la capacité en puissance de l'alimentation (qté cuivre etc) § Choix juste de la taille des semi-conducteurs de puissance (surface de silicium) ü Rendement essentiel § Choix de topologie la plus performante selon le besoin (bon // entre courant et tension en fonction de l'usage) § Chasse aux consommations inutiles (rapport conso à vide) ü Conso à vide / en veille § Chasse au consommation inutiles (ex : circuit mal dimensionné) |
5 |
|
LACROIX |
ü Capacités environnementales compatibles avec l'utilisation (pour éviter pannes juvéniles et améliorer durabilité)
ü MTBF : durabilité à titre comparative § Choix de composant à haute durée de vie (évaluation du Failure In Time) § Evaluation de la durabilité via un plan d'essai pertinent pour trouver des pistes pour l'améliorer (ex : MTBF : durabilité à titre comparative) |
6 |
|
EMKA |
voir si plusieurs fonctions peuvent-être réalisées par un seul module (au lieu de penser un module, une fonction) |
0 |
|
|
|
|
|
|
|
|